Cet article fait partie d’une série dont il est recommandé de commencer par la Partie 1
Maintenant que toutes les entrées/sorties sont identifiées, voici le schéma global de fonctionnement auquel je suis arrivé :
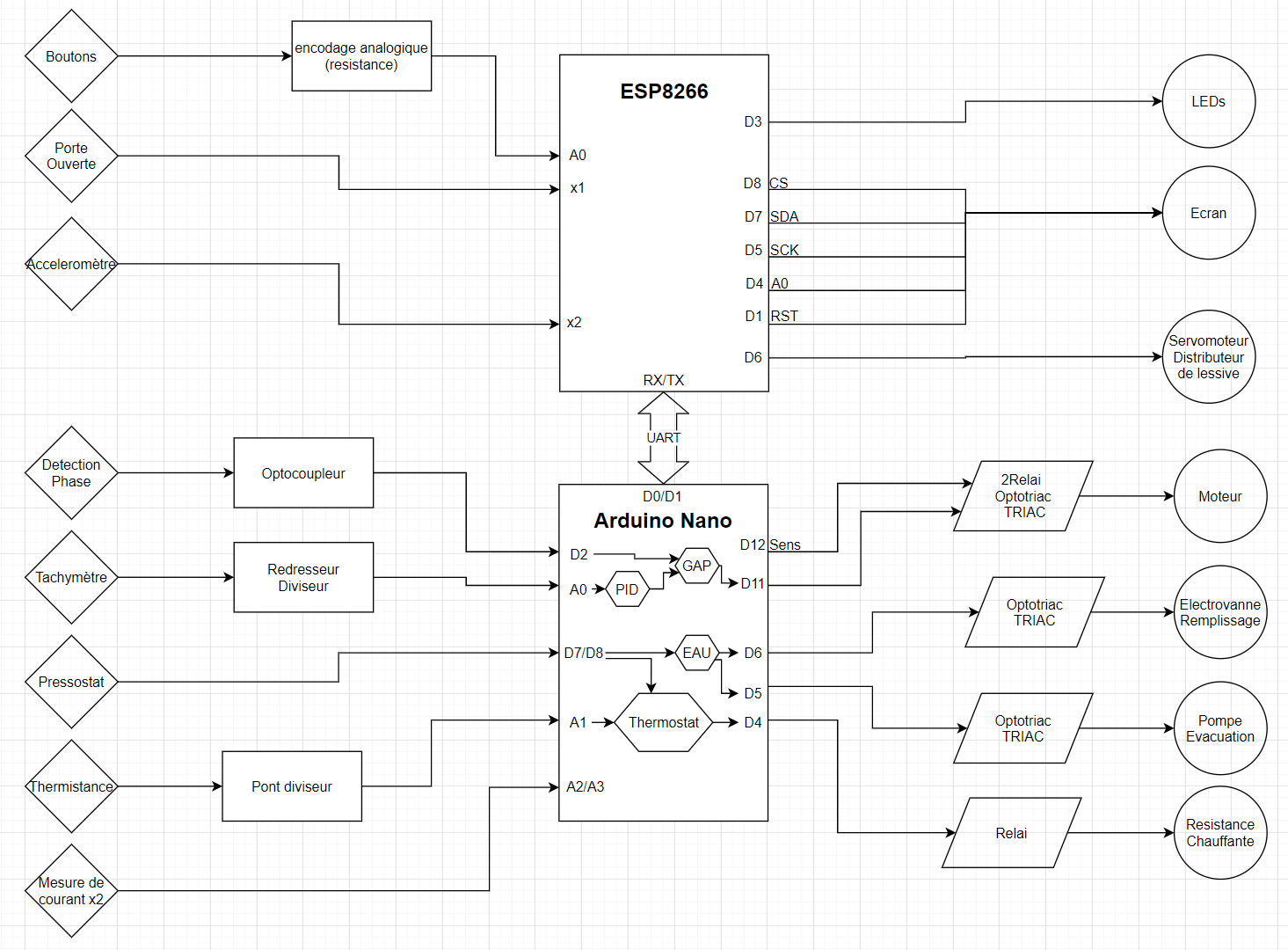
La colonne de gauche représente toutes les entrées (capteurs/boutons) et celle de droite les sorties (actionneur/afficheurs)
Les entrées/sorties
En plus des composants déjà présent, identifiés dans les parties précédentes, d’autres ont été ajoutés pour permettre le bon fonctionnement de la machine.
Un accéléromètre, monté sur la cuve permet de détecter un trop fort déséquilibre du tambour, particulièrement lors de l’étape d’essorage et agir en conséquence.
Des boutons sont présents sur la façade afin de pouvoir sélectionner le programme et lancer le cycle.
Le pressostat est un capteur permettant de mesurer le niveau d’eau dans la cuve. Il était déjà présent et peut avoir seulement 3 états correspondant au franchissement de 2 niveaux. Le premier est le niveau minimum afin que la résistance soit suffisamment immergée pour l’allumé sans risque de la griller, et le second, un niveau correspondant au 3/4 de la cuve que je suppose être la hauteur d’eau maximale à ne pas dépasser.
Un écran et des LED afin d’avoir un retour sur l’avancement du cycle
Les microcontrôleurs
Face au grand nombre d’entrées/sorties, je décide de partie sur une architecture avec 2 microcontrôleurs. Un Arduino nano qui s’occupe de tous les composants 230V et un ESP8266 qui gère les l’interface utilisateur et le WIFI.
Outre l’augmentation du nombre d’entrées/sorties, l’intérêt de cette séparation est d’avoir d’un côté, dans l’ESP, l’intelligence qui gère les opérations les plus chronophages et qui peut facilement être mise à jour par wifi. Et de l’autre côté, dans L’Arduino, l’action, qui agit « sans réfléchir » en temps réel sans interruption, ce qui est nécessaire pour le PID et le GAP.
Les acronymes
Cela ne serait pas un bon schéma sans acronymes incompréhensibles, alors voila leur explication.
Le PID (Proportionnel Intégral Dérivé) du moteur est un système de régulation par boucle de rétroaction. Je ne rentre pas dans le détail, mais cela sert à asservir en vitesse le moteur. Ainsi quelle que soit la quantité de linge dans le tambour, il sera possible de le faire tourner à une vitesse constante.
Le GAP (Gradateur à Angle de Phase) est système permettant de faire varier la tension alternative aux bornes du moteur. Il nécessite une lecture de la phase du secteur qui est noté « détection de phase » sur le schéma.
L’EAU (Élévateur Aquatique Universel) n’est pas un vrai acronyme, c’était juste pour donner un nom au système qui gère le niveau d’eau dans la cuve :-P.
L’étape suivant consiste s’attaque à la nouvelle façade. Partie 6